 Research
Healthcare Robot
Research
Healthcare Robot
Healthcare Robot
연구 개요 및 목적
최근 고령화가 빠른 속도로 진행되면서 헬스케어산업에 대한 중요성이 강조되고 있으며, 정보통신기술(ICT)와 접목하면서 제약, 의료기기, 의료서비스 등 다양한 영역에서의 수요가 증가하고 있다. 본 연구실에서는 로봇 기술에 헬스케어산업을 접목시킴으로써 사용자의 근거리 내에서 실시간으로 생체 정보를 측정 및 관리하는 시스템 구현하고자 각종 센서 및 카메라 영상과 로봇 플랫폼 융합 기술, 피사체의 위치 정보와 움직임 추적 및 이동 궤적 분석 기술 관련 연구를 진행 중이다.
연구 내용
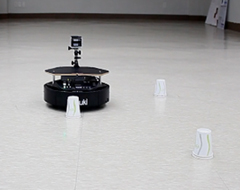
로봇 하부 플랫폼 제어 테스트





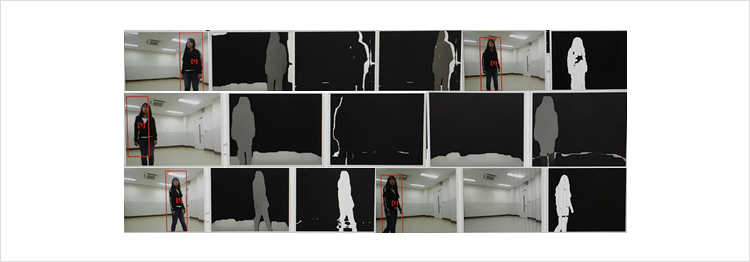
객체 검출 및 추적 알고리즘 연구
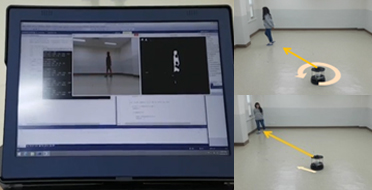
피사체 검출 및 추적 로봇 구동 테스트


서울특별시 노원구 공릉로 232 서울과학기술대학교 창학관 310호
E-mail : jhjeon@seoultech.ac.kr
COPYRIGHT BY CVLab SeoulTech. ALL RIGHTS RESERVED.